Monoid

monoid=magma+associativity+identity
Magma
A magma is a set M matched with an operation • that sends any two elements a, b ∈ M to another element, a • b ∈ M, i.e. \((M,\cdot)\) is a magma, if
Determinant of 3x3 matrix and its derivative
$$ A_{3\times3}(t)=[v_1(t)\ v_2(t)\ v_3(t)]\
\mathrm{det}(A(t))=(v_1(t)\times v_2(t))\cdot v_3(t)\ $$
By applying Leibniz rule for vector and dot product,
Hessian Matrix
Determinant
Properties:
Property 1
Let \(A\in R^{n\times n}\)
\(-1\) can be replaced by any number \(c\)
Property 2
Multiply one column (or one row) by \(k\),
The determinant of the new matrix is k times the determinant of the original matrix.
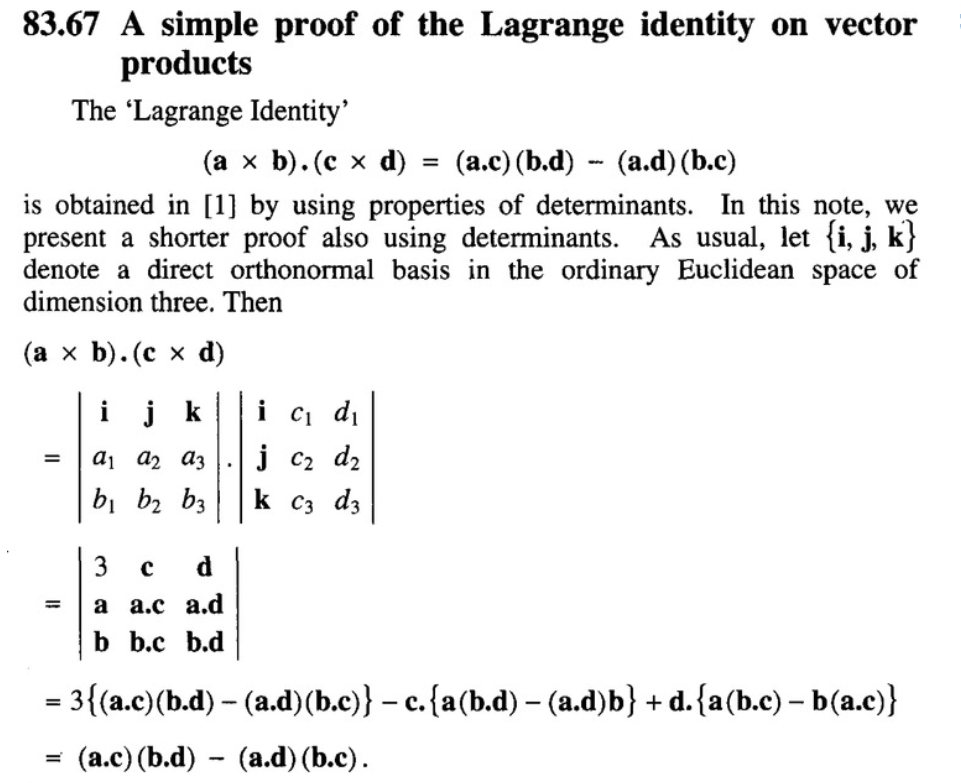
Properties about Cross Product
For \(a,b,c,d\in \mathbb{R}^3\):
which is also know as the vector triple product.
whose proof is given here:
Property of Orthonormal Matrix
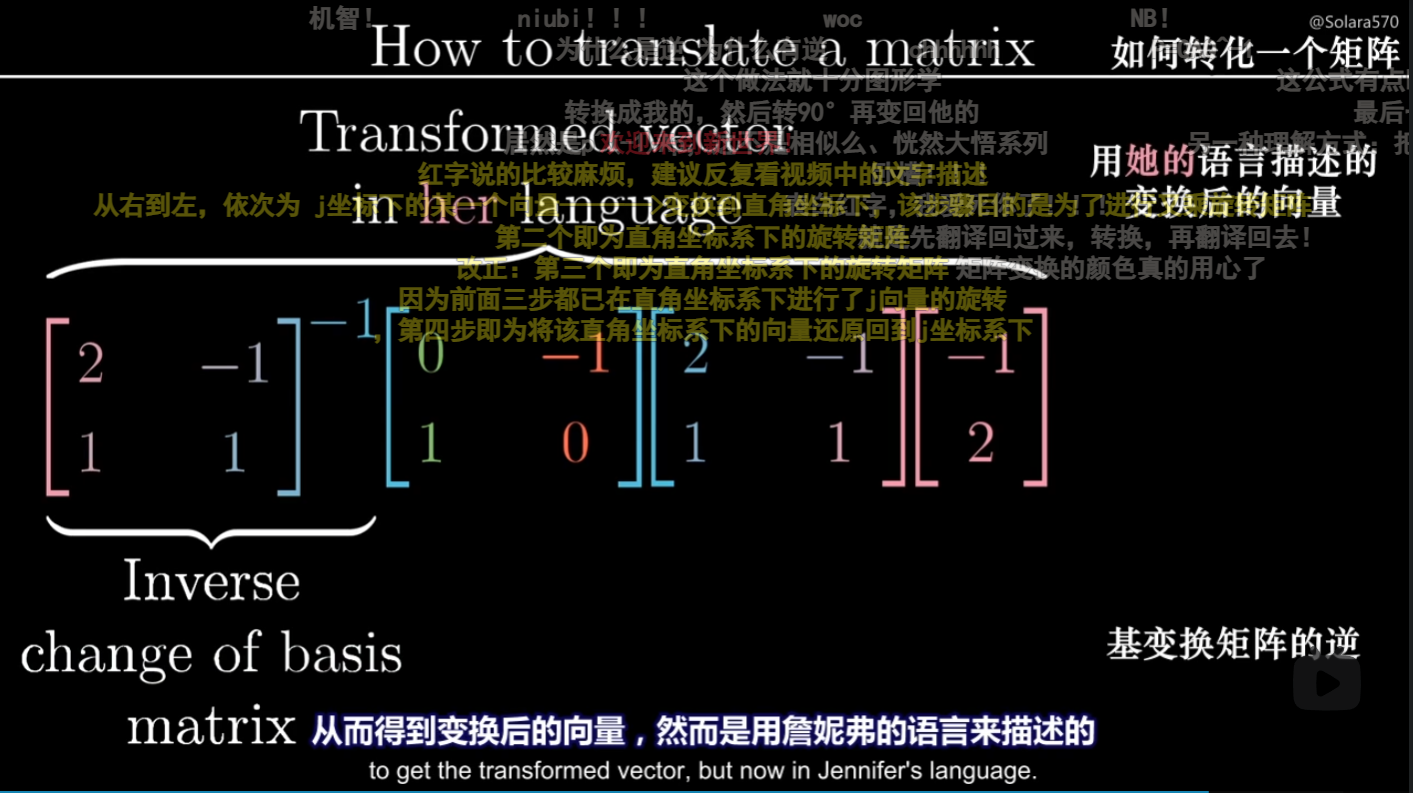
Linear Transformation In Transformed Basis
where \(P\) is the basis of the transformed basis (new basis) in the standard basis (our basis) and \(A\) is the transformation in the standard basis.
Rotation Matrix
rotates points in the \(xy\) plane counterclockwise through an angle \(\theta\).
Judge whether a matrix is a rotation matrix
A matrix is a rotation matrix iff \(R^T=R^{-1}\) i.e. \(R^TR=I\) and \(detR=1\)
Calculate the axis of the rotation matrix
The axis of the rotation matrix stays unchanged after rotation, i.e. \(Rx=x\), \((R-I)x=0\)
Solving the equation and we get the axis of the rotation.
Calculate the rotation angle of the rotation matrix
Choose a random vector, usually \(v=(1,0,0,...,0)\). Therefor, \(w=Rv\), i.e. \(v\) after rotation, is the actually the first column of \(R\) (or you can just do the calculate).
Let \(a\) be the vector representing the axis of the rotation.
We can use \(v'=v-\frac{aa^T}{a^Ta}v\) to get the vector perpendicular to the axis while pointing from the axis to the end of \(v\). Similarly, use \(w'=w-\frac{aa^T}{a^Ta}w\) to get the vector perpendicular to the axis while pointing from the axis t othe end of \(w\).
It's easy to find that \(Span(v',w')\) is perpendicular to the axis \(a\). Therefor, the angle between \(v'\) and \(w'\) is the angle of the rotation, i.e. \(\arccos(\frac{<v',w'>}{||v'||||w'||})\)
QR Factorization
Reference: this video and this video(better, starts at 25:30)
Nullity of a Matrix
Basically, the dimension of the null space.
Null Space / Kernel of a Matrix
Reference: this video and this video(talks about how to calc)
The null space of \(A\) is all solution \(x\) (a vector), s.t. \(Ax=0\). Often denoted as \(N(A)\) or \(ker(A)\)
Rank of a Matrix
Basically, the dimension of the column space.
Reference: this page
It tell you how to calc the rank of a matrix.
Projection Matrix
Reference: this page
Use Ctrl+F to search for the Projection Matrix part, in which you can find how to solve projection matrix onto certain space.
A projection matrix onto a col space of \(Q\) is:
Specifically, if \(Q\) is a square orthonormal matrix, then \(P=I\)